UR Driver¶
The Jacobi Universal Robots (UR) Driver uses the Real-time Data Exchange (RTDE) feature of the UR controllers.
Driver Installation¶
To install the Jacobi driver, either download the Debian package from account.jacobirobotics.com or install the Python package via
pip install jacobi-universal-driver
Robot Setup¶
First, make sure to set up the robot’s network settings based on your network requirements and note down the robot’s ip address for the drivers’s host.
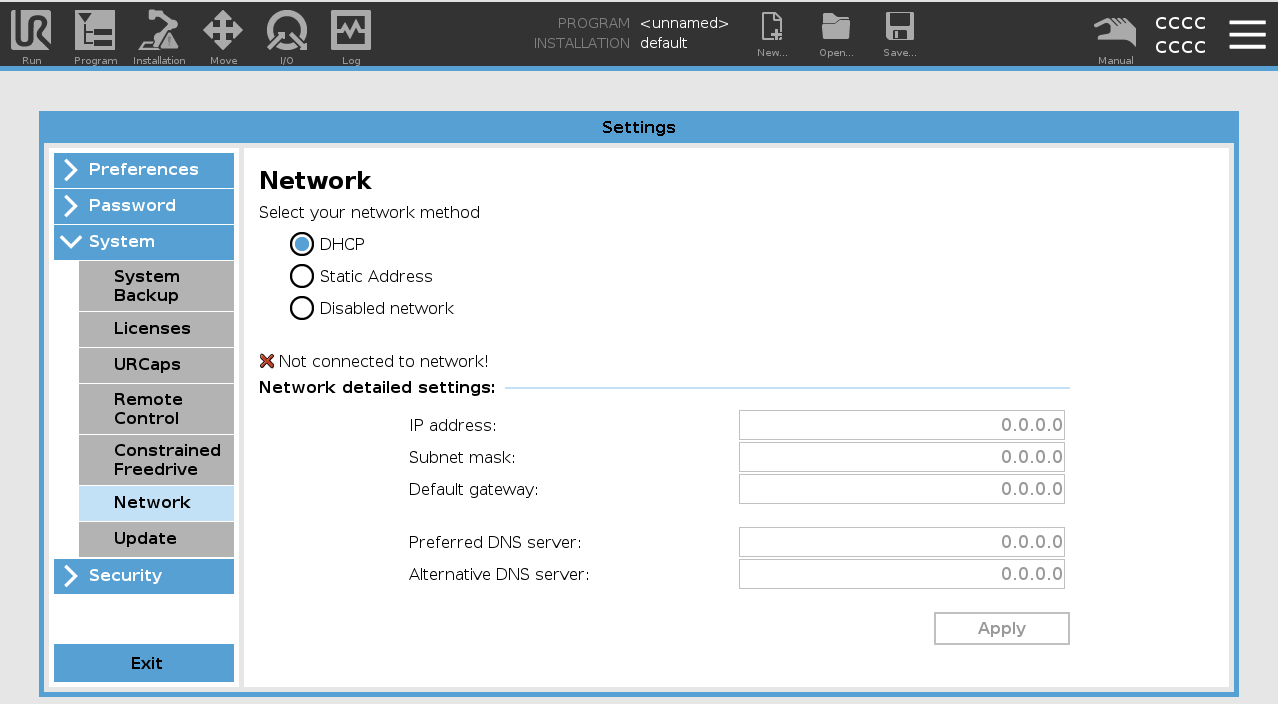
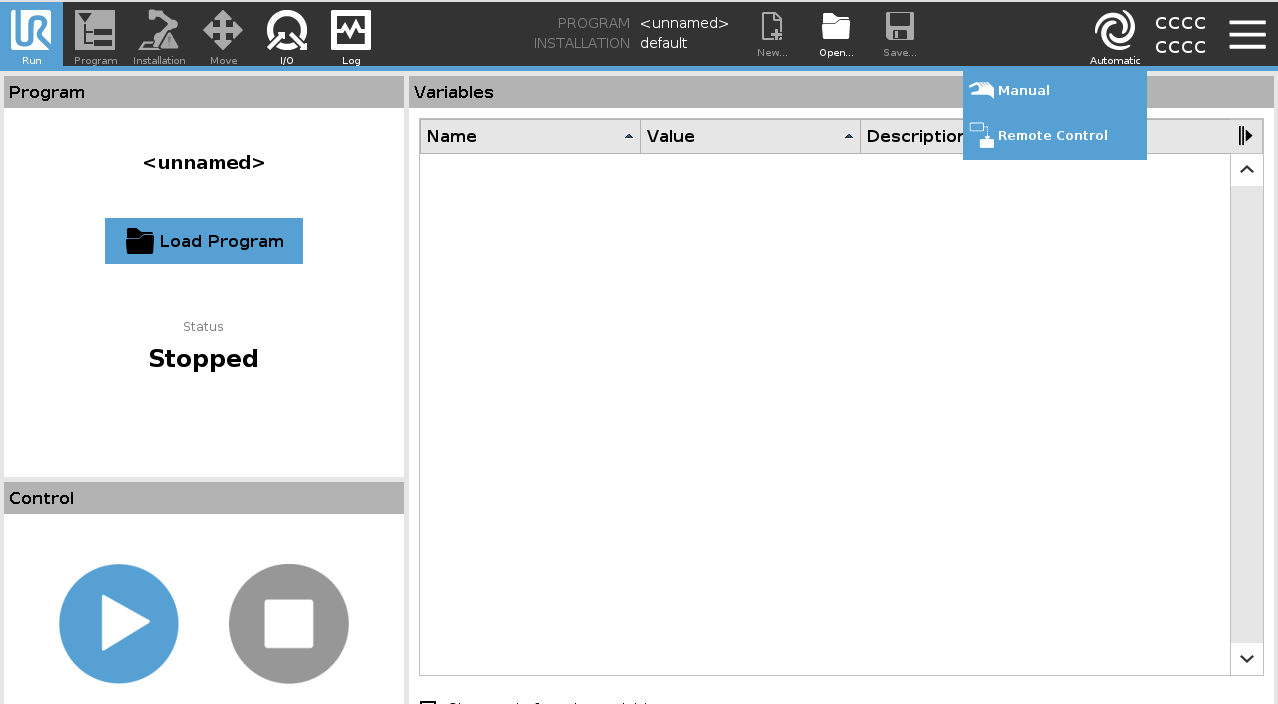
As a heads up, changing the network settings might require a controller restart. Then, enable remote control on the teach pendant in the top right menu bar. If this item is not visible, you might need to enable remote control in Settings / System / Remote Control.
I/O Setup¶
The I/Os on a UR controller are grouped (e.g. digital standard input or digital tool output) and numbered (e.g. from 0-7 or 0-1). As Jacobi does not use the same grouping, we define following mapping between UR’s and Jacobi’s I/O naming:
UR Group |
UR Number |
Jacobi Group |
Jacobi Number |
|---|---|---|---|
Standard Digital In |
0-7 |
Digital Input |
0-7 |
Configurable Digital In |
0-7 |
Digital Input |
8-15 |
Tool Digital In |
0-1 |
Digital Input |
16-17 |
Standard Digital Out |
0-7 |
Digital Output |
0-7 |
Configurable Digital Out |
0-7 |
Digital Output |
8-15 |
Tool Digital Out |
0-1 |
Digital Output |
16-17 |
We currently do not support renamed I/Os directly.
Examples¶
Here, you can find several examples of using the Driver alongside the Jacobi Motion library.
License Attributions¶
This software depends on included third-party libraries that require reproduction of the license text in our distributions.
ur_rtde: MIT License